Full Text:
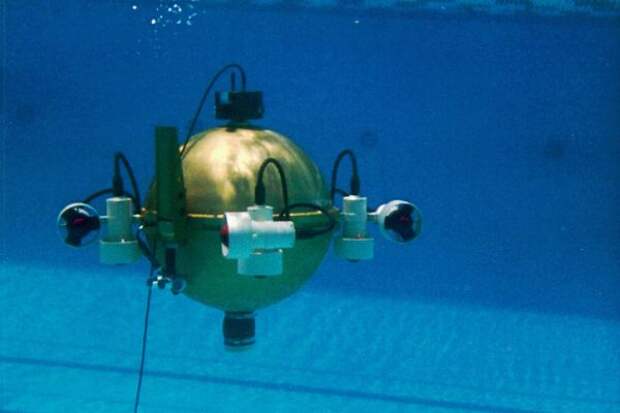
ODIN (Omni-Directional Intelligent Navigator) is a sphere-shaped, eight-thrusted, autonomous underwater robot capable of instantaneous movement in all six degrees-of-freedom motions. ODIN was first built in 1991 as a remotely operated robot and, in 1995, was upgraded to ODIN II, an autonomous underwater robot using a Motorola 68030 and VxWorks.
In 2001, it was again upgraded to ODIN III, which is based on a PC104+ and Window 2000 with Real Time eXtension embedded real-time system. The robot currently has various navigation sensors including eight sonars, a pressure sensor and inertial measurement unit, as well as advanced navigation and station-keeping software utilizing Kalman filters.Image credit: Courtesy the Autonomous Systems Laboratory, University of Hawaii
